視点/視角の指定方法
MATLAB、OctaveではOpenGLを使って3Dプロットができる。グラフを描くキャンバス空間に対してカメラ(肉眼と思ってもいいが)の視点/視角を指定できる。指定方法は、キャンバス空間側の原点からカメラ(or 眼球)までベクトルの3次元極座標表示を使う。
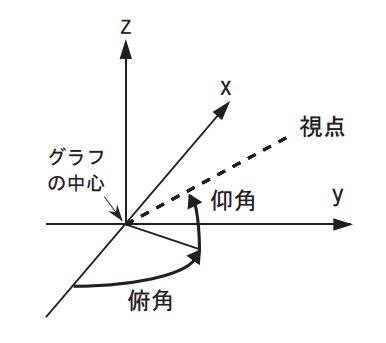
- 俯角(azimuth)は方向角、方位角ともいう。x軸の負方向を基準に測っている。
- 仰角(elevation)は、見上げる角度。x-y平面を0としてz軸正方向に測る。
飛行機の姿勢記述だと:

- 仰角がピッチ角に対応するが、飛行機では符号が反対のこともある、z軸を上下逆に取るから。
- 俯角がヨー角=ターン角に対応する。基準位置からのターン(方位変更)が俯角変更。
視線記述も姿勢記述も原理は同じ。砲塔をコントロールして打つとかでも同じ。スターウォーズでフィンがやったことだね→ ミレニアムファルコン号による空中レーザー戦 vs タイファイター - 檜山正幸のキマイラ飼育記 メモ編
[追記]
用語法が違う。
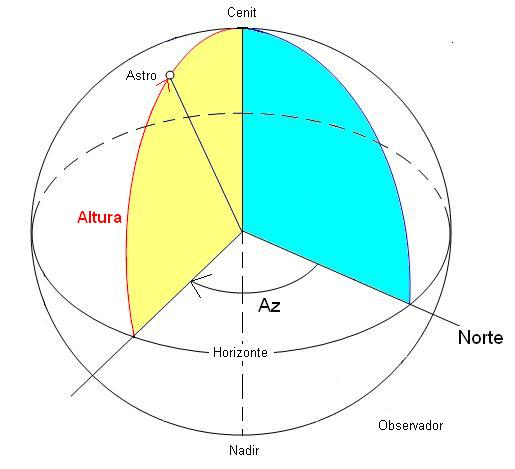
- azimuth は方位角、アジマス
- altura が仰俯角、先のelevationと同じ。高度(角)ともいう。
- holizonte 地平線(スペイン語)
- norte 北(スペイン語)
- cenit 天頂(スペイン語)zenithもある。
- nadir 天底(天頂 (zenith) の正反対に位置する点)
- observador スペイン語のオブザーバー
[/追記]
{kind=link}